Research
Overview
My research spans mathematical modeling and numerical simulation of physical systems, with an emphasis on
acoustic wave simulation and its applications in computational audio and architectural acoustic design. My approach to modeling and simulation takes advantage of mathematical
ideas such as conformal symmetry, differential forms, and variational principles. These concepts can be
used to overcome many difficulties and limitations that exist in standard Newtonian models and coordinate-based
Euclidean spaces. Recently, I have utilized these tools in three areas of acoustic wave simulation: exterior
boundary handling, non-spherical harmonics, and elastic wave propagation. Accurate wave-based acoustic simulation is especially useful for computational audio and acoustic design applications, such as
audio AI technology, personalized spatial audio, computational sound synthesis, and urban/architectural acoustics. Past
research projects include underwater acoustic sensing, numerical simulation for audio-haptic devices, and optical standing-wave trapping.
Conformal Symmetry for Exterior Wave Problems
I have developed mathematical and computational tools for handling open exterior boundaries in wave
simulations, including a differential geometric method that solves the wave equation in infinite
spacetime and a high-performance implementation of the discrete perfectly matched layer that exhibits machine-zero reflections. Future
directions of my research involve developing boundary flattening methods for curved obstacles and formulating a
finite-element method version of the reflectionless perfectly matched layer. A common
theme in this work is the discovery of conformally invariant transformations of wave propagation, an
approach that derives from Felix Klein's Erlangen program. Application areas of interest include audio AI,
urban/architectural acoustics, and spatial audio. Image caption (left to right): solution to the Helmhotz
equation in infinite space, (next two images) solution to the wave equation in infinite spacetime, local flattening
of a circular boundary, and frequency-domain implementation of the reflectionless discrete perfectly matched layer.

Differential Forms for Non-Spherical Harmonic Decomposition
Below is an image of four of the harmonic modes of the Stanford bunny mesh. From left to
right, I've plotted the \(0^{th}\), \(1^{st}\), \(2^{nd}\), and \(6^{th}\) modes. In this methodology, I
compute the displacement of each mode by numerically solving an eigen value problem at every vertex on the
triangulated mesh. The purple portions represent regions where the displacement is maximally negative, and
the red portions represent where it is maximally positive. Notably, the solution is computed using
coordinate-free differential forms, which allow one to more easily model dynamics on arbitrary geometries.
Applications areas of interest include audio AI, spatial audio, architectural acoustics.

Variational Principles for Elastic Wave Modeling
A variational principle is a method used to model the state or dynamics of a physical system. The
physical model which a variational principle derives is a function that optimizes the value of a physical quantity of
the system. For example, one can use the stationary action variational principle to model a physical system by minimizing
a quantity known as the action between two states of the system. The action is the accumulated value of a so-called
Lagrangian, which for many systems is equal to the difference between the kinetic and potential energies of the system.
Currently, I am developing 3D elastic simulations based on a physical model derived using the first Piola-Kirchoff stress
tensor and its corresponding Lagrangian. The next phase of the project is to simulate passive surface waves in an
elastic membrane with homogeneous fluid chambers above and below the membrane. Of particular interest is the application
of these methods to simulate elastic waves in mammalian hearing organs and musical wind instruments. The simulation data may be
useful for hearing aid technologies and computational sound synthesis. Image caption (left
to right): elastic deformation of a 3D geometry, fluid flow in a 2D plane, (next two images) longitudinal section of the
human cochlea and section of the organ of Corti (Gray's Anatomy, 1918).

Past Projects
Optical Standing-Wave Traps
Optical trapping is a useful tool for manipulating
microscopic particles and probing the physical interactions of matter. However, early optical trapping techniques
introduced complications for analyzing Brownian particle diffusion in viscous media because they either restricted the
particle motion or trapped the particles too close to a surface. My work presents the first known
realization of two-dimensional tracking of Brownian microparticles in multiple, surface-isolated optical traps.
The fabricated optical traps allow tight z-axis confinement and loose transverse (xy-plane) confinement of microparticles in the central maximum
of a standing-wave Bessel beam (note: the Bessel beam propagates along the z-axis).
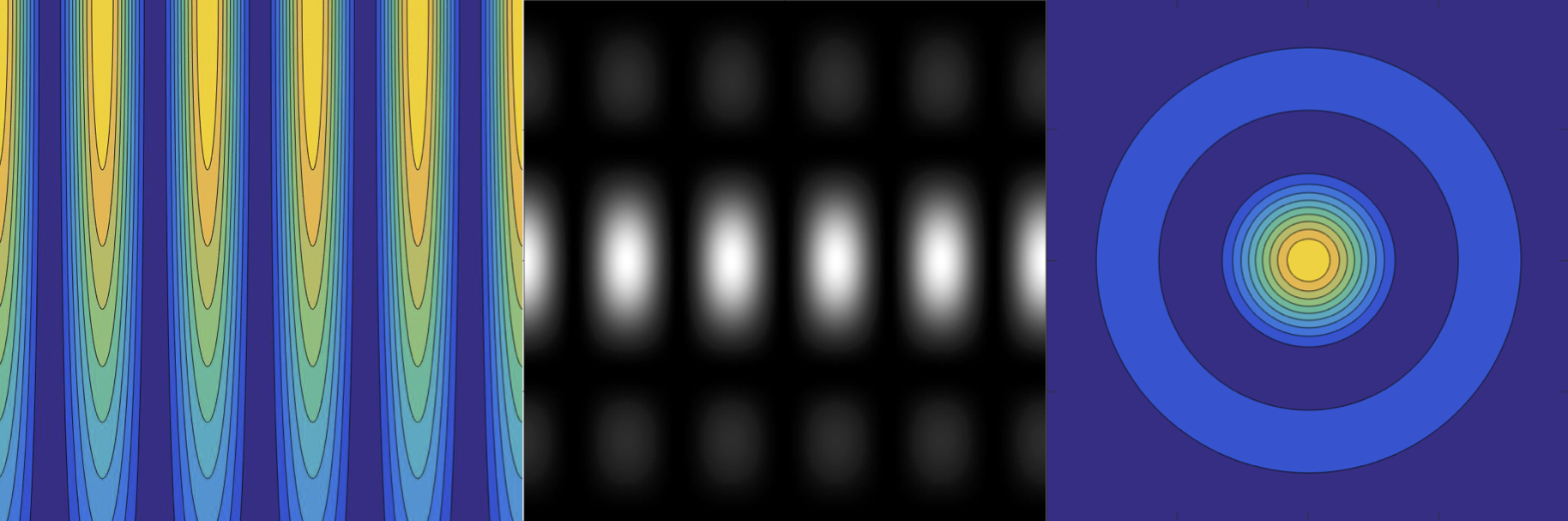
As part of this project, I modeled and simulated the normalized field irradiance of the standing-wave Bessel beam,
as shown below. My model is based on the electric and magnetic field solutions to Maxwell's free-space scalar wave equation. Image caption
(left to right): contour plot of the field irradiance in the xz plane, grayscale plot of the field irradiance in the
xz plane, and contour plot of the field irradiance in the xy plane.